MIT’s origami robotic gripper takes cues from a Venus Fly Trap
Nature, by far is the greatest and most powerful innovator. Scientists have been emulating nature’s genius and working over the past decades on research and development to design and produce innovative technology taking cues from the nature. This approach to innovation is known as Biomimicry. Roboticists specifically are exploiting nature’s strategies by creating intelligent and adaptive robots that could be game changer in health care, manufacturing, building and energy sector.
A team of technologists from MIT have developed a robot gripper that resembles and behave in a similar manner as a Venus Fly Trap by grasping objects heavier than its own weight. Named Magic Ball Gripper, it uses 3D-printed origami structure and comprises of a 3D-printed, 16 piece cone-shaped silicone rubber skeleton which is connected to a vacuum device encased in an airtight skin made from either rubber balloon or thin fabric sheet. As the cone is placed on an object, the vacuum causes the skin to contract and grasp the object.
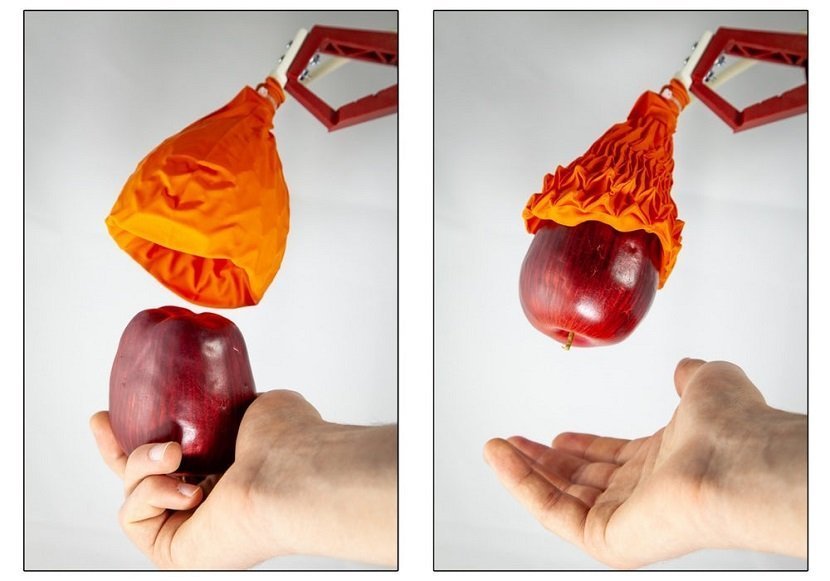
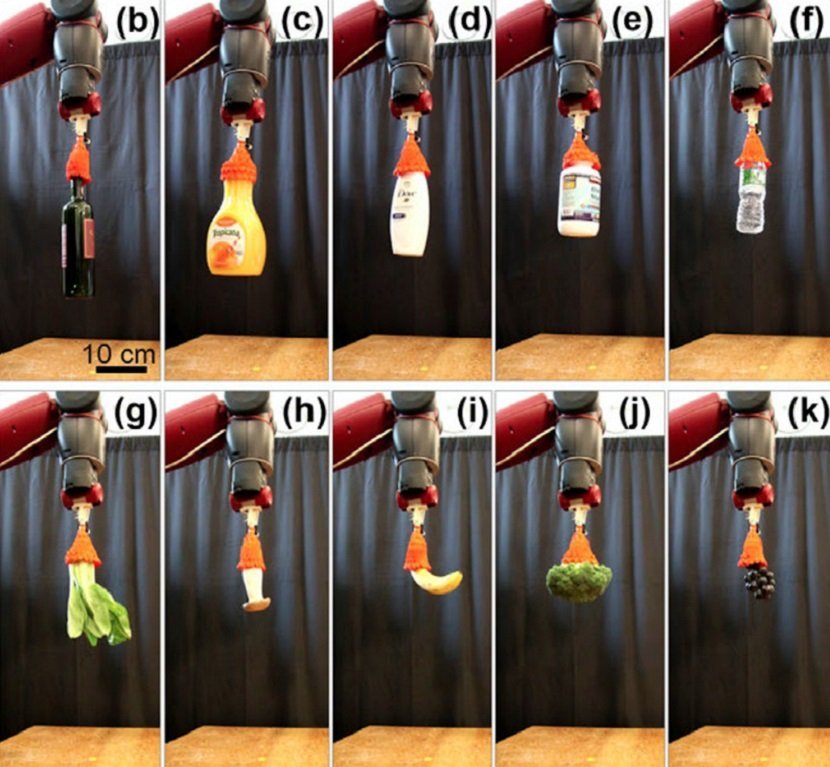
The design team deliberately used soft and flexible material so that the gripper can mold itself according to the objects shape without compromising its grip. This allows the robot to pick even fragile objects such as an egg or a banana. From the looks of it, it seems difficult to comprehend its potential but the robot can lift objects 100 times its own weight with up to 70 percent of its diameter without destroying or dropping them.
MIT professor Daniela Rus, director or MIT’s Computer Science and AI Laboratory believes that the flexible appendage to robotic arms can solve packing problems. “One of my moonshots is to create a robot that can automatically pack groceries for you,” says Rus.
A paper describing the technology has been published online by the name “A vacuum-driven origami ‘magic ball’ soft gripper” which explores prospective alternates for stiff metal robotic hands.