Festo has brought to life a new prototype called the Bionic Soft Hand which stands out for what its name exactly suggests – a soft robotic hand that can perform tasks with expertise!
The hand is essentially covered in silicon as the makeshift skin and every finger consists of linked bellows-style air chambers. These are made up of knitted material which in turn is made out of elastic and high-strength threads which adds to its flexibility. Once you inflate or deflate a chamber, it can bend in one particular direction.
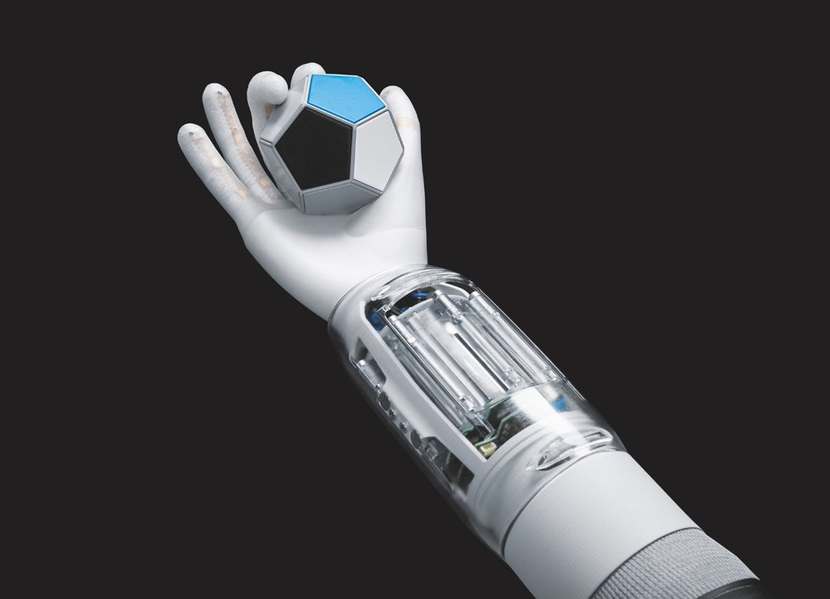
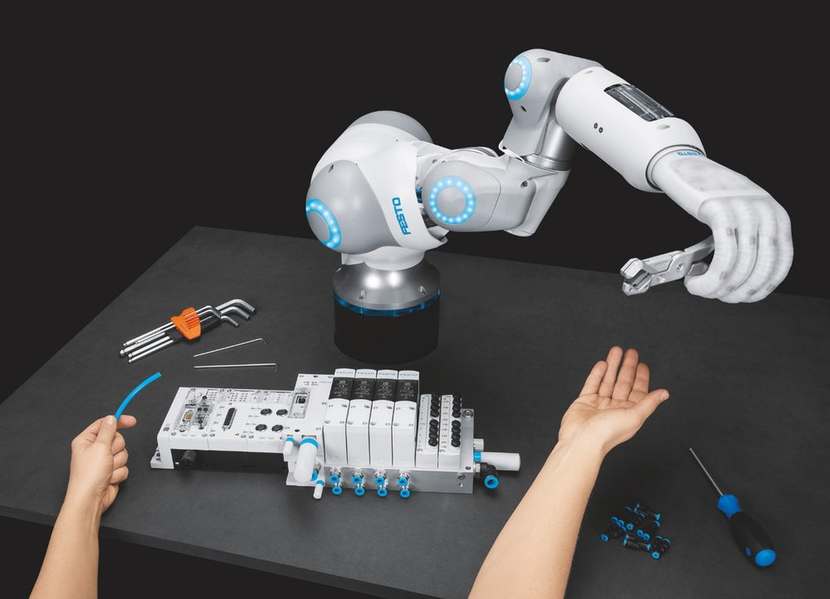
When air is pumped into and out of each of the chambers through rubber tubes, expansion and contraction take place as a consequence which in turn makes the finger open and close. There is a digitally controlled valve which joins the multiple air tubes together. From this bunch we have two tubes passing down to the robotic arm. One of these tubes is meant for the incoming air and one for the outgoing air.
Every joint between the chambers is embedded with inertial sensors. Along with this, there is a tactile sensor on the chamber’s undersides which make it all the more realistic by allowing the hand to feel the pressure changes.
The hand has been programmed to try and find its own way to a pre instructed end goal using multiple trials. This is done by using a digital twin of the robotic hand, on a computer that is made using a depth-sensing camera. To understand the dynamics of various functions, it uses the help of artificial intelligence.

The Hannover Messe trade show happening next month will showcase the use of this latest technology. The BionicSoftHand will be accompanied by the launch of the BionicSoftArm which operates with a similar principle.